הקדמה לקורס פיזיקה מודרנית
מטרת ההקדמה (במסגרת השעה הראשונה של הרצאת הפתיחה) היא לתת מוטיבציה לקורס. הנושאים שמוזכרים בהקדמה יועברו בהמשך הקורס בצורה מסודרת. בפרט הנושא של תנודות וגלים בהרצאה 3, והנושא של מיחשוב קוונטי בהרצאה 9. להלן מעין תקציר של ההקדמה
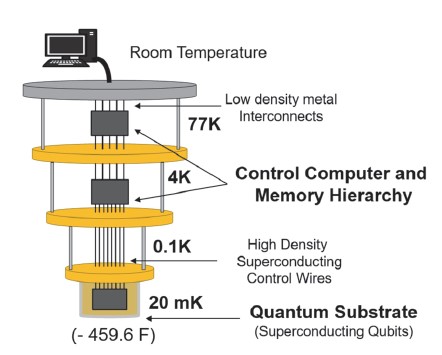
טכנולוגיה - קרור
המטרה:
להוריד את הטמפרטורה הסביבה
לבודד את המערכת מהסביבה
סביבה, דיספציה, חיכוך
כדור הארץ נע סביב השמש ללא חיכוך…
אבל על פני כדור הארץ קשה להתפטר מהחיכוך.
אריסטו...
דוגמאות:
תנועה של מכונית על הכביש.
תנועה של אלקטרונים בחוט חשמל.
ניוטון...
אלקטרונים בפס הולכה:
עם סביבה - בגלל הפונונים - דיפוזיה, סחיפה
בלי סביבה - תנועה בליסטית או תנודות בלוך
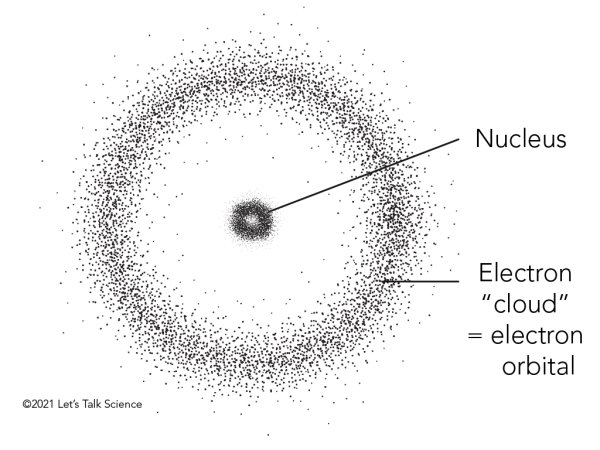
כל אורביטל זה כמו "אתר" (site) שבו יכול להמצא אלקטרון. האלקטרון יכול לקפוץ מאורביטל של אטום אחד לאורביטל של אטום שכן. להלן קריקטורה של חוט חשמל שמורכב משרשרת של אטומים.
אלקטרונים בחוט חשמל
אפשר לחשוב על חוט חשמל כעל שרשרת של אטומים. בטמפרטורת החדר השרשרת הזו רוטטת. הרטיטות האלו גורמות לאלקטרון לקפוץ מאטום לאטום. מבחינה סמנטית אנו מדברים על "שרשרת אתרים" sites שאותם אנו ממספרים באמצעות קואורדינטה x. התנועה של האלקטרון היא "מהלך אקראי". אם יש הרבה אלקטרונים אנו מדברים על "דיפוסיה". בממוצע הזרם הוא אפס. אם מפעילים שדה חשמלי אז יש יותר קפיצות בכיוון אחד מאשר בכיוון השני, ואז אנו אומרים שיש סחיפה drift. לכן נוצר זרם. הזרם בקרוב פרופורציונלי לעוצמת הכוח החשמלי. זה נקרא חוק אוהם". הסוג הזה של הדינמיקה נקרא "דינמיקה סטוכסטית". אם יש כוח יש זרם. אם אין כוח אין זרם.
הדינמקיה הסטוכסטית שונה מאוד מהדינמיקה של ניוטון... כדי לראות את הדינמיקה של ניוטון צריך לקרר את השרשרת. במילים אחרות צריך לחשוב על אלקטרון שלא מושפע מהסביבה התרמית. במקרה כזה מתברר שהתנועה הופכת להיות בליסטית. המהירות תהיה קבועה, ואם יש כוח הוא יגרום לשינוי המהירות...
אם מדובר באלקטרון במערכת שכוללת שני אתרים בלבד, זה למעשה קיוביט qubit. האלקטרון יכול להיות באתר אחד ("0") או באתר שני ("1") או בסופרפוזציה (למשל "0+1"). אם יש לנו רגיסטר שכולל נניח
\( N \)
קיוביטים אז אפשר להכין אותו בסופרפוזיציה של
\( 2^N \)
ערכים אפשריים. זה מאפשר לבצע חישוב "מקבילי" על כל הערכים האלו באמצעות פרוססור יחיד, וכך לפצח את הקוד... בלי מחשב קוונטי כמות הפעולות שצריך לבצע היא אכספוננציאלית, ולכן אי אפשר לבצע את הפיצוח של הקוד עם מחשב קלאסי. הדוגמה הזו ממחישה את הרעיון שחלקיק יכול להיות בו זמנית בשני מקומות (בשני מצבים). זה לא שהוא "או כאן או שם" -- כי אז המחשב הקוונטי לא היה מצליח לפצח את הקוד.
תאור מתמטי של תנודות
נגדיר:
\( a =\text{"position" coordinate of the oscillator (arbitatry units)} \)
\( b =\text{"velocity" coordinate of the oscillator (arbitatry units)} \)
\( \Psi = (a,b) = a+ib = A e^{i \varphi} = \text{"complex" coordinate of the oscillator} \)
שימו לב: הקואורדינטה
\( a \)
יכולה לייצג תזוזה של מסה שמחוברת לקפיץ, או שינוי בלחץ אויר (גלי קול), או שדה חשמלי (גלים אלקטרומגנטיים). בשביל להגדיר את "המצב" של המתנד צריך את הקואורדינטה הקומפלקסית
\( \Psi \)
שכוללת גם את קצב השינוי
\( b \)
("המהירות"). זה מאפשר להגדיר (באמצעות קואורדינטות פולריות) את "האמפליטודה"
\( A \)
של התנודה וגם את "הפאזה"
\( \varphi \)
של התנודה. בתנועה הרמונית פשוטה האמפליטודה היא קבועה, והפאזה משתנה בזמן. האנימציה הבאה ממחישה את השינוי המחזורי במצב של מתנד. שימו לב שהם סובבו ב90 מעלות את מערכת הצירים.
Wikipedia: Animation of simple harmonic motion. (The velocity and position axes have been reversed from the standard convention in order to align the two diagrams)

ההשתנות של מצב המתנד כפונקציה של הזמן היא
\( \Psi(t) = Ae^{-i\omega t} \)
\( \omega = \text{frequency} \)
\( \text{cycle} = 2\pi \ \text{radians} = 360^o \)
\( 50 \text{Hz} = 50 \frac{\text{cycles}}{\text{sec}} = 50*2\pi \frac{\text{radians}}{\text{sec}} \)
במערכת צירים סטנדרטית (ציר אופקי a וציר אנכי b) התנועה במרחב הפאזות היא בכיוון מחוגי השעון (במהירות חיובית התנועה היא ימינה, במהירות שלילית התנועה היא שמאלה). לכן הפאזה (הזוית) גדלה בכיוון השלילי. פרק זמן של מחזור תנודה הוא
\( \text{TimePeriod} = \frac{2\pi}{\omega} \)
המחשה של גלים
כל אחד מהמתנדים באנימציה להלן מבצע תנודה עם אותה אמפליטודה, אבל יש הפרש פאזה (קבוע) בין תנודות של מתנדים סמוכים. זו דוגמה של גל פשוט. יכולות להיות כמובן גם תנודות מסובכות יותר (נדבר על זה בעתיד). המטרה שלנו בהרצאה הנוכחית היא להסביר איך מתארים גל כזה בצורה מתמטית. בהמשך ההרצאה נדבר גם על התאבכות של גלים.
שימו לב: אם עוקבים אחרי המכסימום הוא כאילו נע ימינה. התנודה זזה ימינה. זה נקררא גל מתקדם. המתנדים עצמם לא זזים. המרחק בין מכסימום למקסימום זה למעשה "אורך הגל". ניסוח מוצלח יותר: אורך גל זה המרחק שצריך לזוז כדי לראות תנודה עם אותה פאזה.

סרטונים ביוטיוב:
Waves: Frequency & Wavelength
Water Waves - Interference Experiment
תאור מתמטי של גלים
עכשיו נסתכל על שרשרת של מתנדים מצומדים. אנו נראה שיכולים להופיע בה גלים (כמו תנודות במיתר). התנודה של המתנד הראשון, השני, השלישי... מתוארת על ידי הפונקציות
\( \Psi(0,t) = Ae^{-i\omega t} \)
\( \Psi(1,t) = Ae^{i(k-\omega t)} \)
\( \Psi(2,t) = Ae^{i(2k-\omega t)} \)
...
\( \Psi(x,t) = Ae^{i(kx-\omega t)} \)
באשר
\( k = \text{wavenumber} = \text{momentum} = p \)
הוא הפרש הפאזה בין מתנדים סמוכים.
משתמשים בסימון k או p בהתאם להקשר הפיזיקלי.
באופן כללי התנודה מתוארת באמצעות פונקצית הגל
\( \Psi(x,t) = Ae^{i(kx-\omega t)} \)
המרחק בין מתנדים שמתנדנדים באותה פאזה הוא
\( \text{WaveLength} = \frac{2\pi}{k} \)
לחילופין אנו רושמים בתקצירי ההרצאה שאם מודדים את אורך הגל
\( \lambda \)
של אלקטרונים אז התנע הוא
\( p = \frac{2\pi}{\lambda} \)
הרצאה מס' 1
לאחר ההקדמה עברנו להרצאה מס' 1 כפי שהיא מתועדת בתקצירי ההרצאה. תארנו את הדרך שבו מודדים תנע באמצעות התאבכות (ניסוי שני סדקים). תארנו את הדרך שבה אפשר למדוד מהירות. דיברנו על הקשר בין מהירות לבין תנע. הגדרנו את המושג מסה. הסברנו שחוקי ניוטון זה למעשה מה שנקרא בפיזיקה מודרנית "חוק שימור התנע". בפרט תארנו איך אפשר לקבוע את יחס המאסות של שני גופים באמצעות מדידת מהירויות לפני ואחרי התנגשות ביניהם.